Computer Vision Lab
Nikolay Falaleev
Home
A Robotics, Computer Vision and Machine Learning lab by Nikolay Falaleev. The main focus of the blog is the application of Deep Learning for Computer Vision tasks, as well as other relevant topics: classical Computer Vision, Numerical Methods, and Hardware.
A practical guide to upgrading MLOps infrastructure by dockerizing MLflow, decoupling storage with PostgreSQL and MinIO, and performing a migration from local SQLite to a production-ready setup.

Benchmarking the top consumer-grade Nvidia Blackwell GPU against previous generations in Computer Vision and LLM applications.

Analysis of cost-effective use of Intel iGPUs with ipex-llm to accelerate VLMs and LLMs with detailed benchmarks and practical setup instructions.

Classical strategies and learning-based approaches for achieving accurate multicamera calibration in real-world.

Practical advice on achieving better calibration accuracy in real-world scenarios while addressing common pitfalls and OpenCV model selection strategies.
Physical and optical considerations of accurate real-world camera calibration - practical tips and techniques.
Comparison of the direct OpenCV camera calibration method with an approach based on a homography matrix.
Application of Deep Learning in Sports and similarities with the Self-Drivind field.
An approach to generate camera calibration values from football broadcast videos.

Benchmark results of GTX 1080 TI, RTX 2080Ti, 3090 and 4090 on DL tasks.
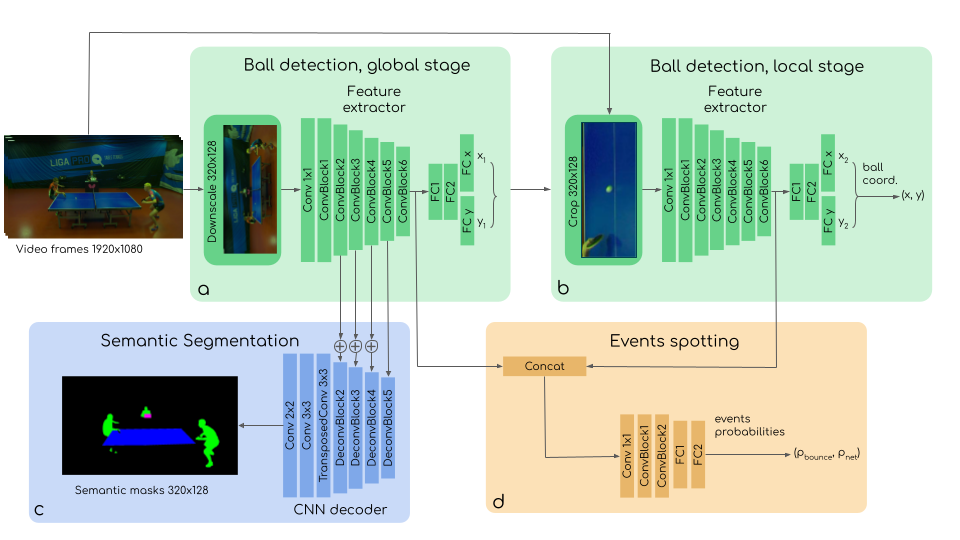
Balancing temporal and spatial losses for simultenious training of multi-task neural networks for video processing and some data tips.

Comparation of Nvidia RTX 2080 Ti with GTX 1080 Ti and 1070.
A gold medal solution of the TGS Salt Identification Challenge.

Kaggle Challenge to segment salt deposits beneath the Earth's surface on seismic images.

How to increase inference speed on a semantic segmentation task and further ideas.
A CNN approach used for multiclass semantic segmentation during the Lyft Perception Challenge.

A partnered Lyft and Udacity semantic segmentation challenge with synthetic images.

An approach how to increase your position on a leaderpoard in a classification datascience competition by balancing predictions.

Ideas and approach to the Kaggle IEEE's Signal Processing Society - Camera Model Identification challenge.

A set of instruction to run a modern version of the deep learning framework TensorFlow on AMD Ryzen.

VGG16-based fully convolutional networks for semantic segmentation of images on Cityscapes
Application of a linear SVM for image classification with HOG, binned color and color histogram features.

Computer vision approach for road marking detection with adaptive thresholds and positions of virtual sensors.
Convert a normal image to a Bird's Eye view projection with OpenCV.
A simple way to calibrate an optical system with a chessboard pattern by means of the OpenCV to reduce distortion.
An approximate approach to find an equidistant curve for a given polynomial.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}